The University of Southern Mississippi’s School of Ocean Science and Engineering (SOSE) provides advanced research, education, and technical services across ocean-related disciplines. SOSE has faculty expertise in hydrography, as well as the design, operation, and coordination of autonomous underwater and surface platforms. A particular strength lies in the development of small AUVs, to support high-resolution seafloor mapping and coastal monitoring.
SOSE operates a diverse fleet of autonomous systems and develops oceanographic models to predict and optimize operational conditions. These capabilities enable the execution of collaborative, multi-platform missions in complex marine environments.
SOSE also has access to a dedicated test range operated by the University of Southern Mississippi in the northern Gulf of America, equipped with a permanently installed ocean sensor network. This infrastructure provides real-time environmental data and forecasting tools that support the testing, validation, and operation of autonomous platforms under realistic and challenging conditions.
Through a combination of platform innovation, predictive modeling, and field operations, SOSE delivers cutting-edge solutions for ocean observation, resource management, and marine autonomy.
Focus Area: Advanced/Additive Manufacturing
Contact
Gero Nootz
gero.nootz@usm.edu
407-463-6834
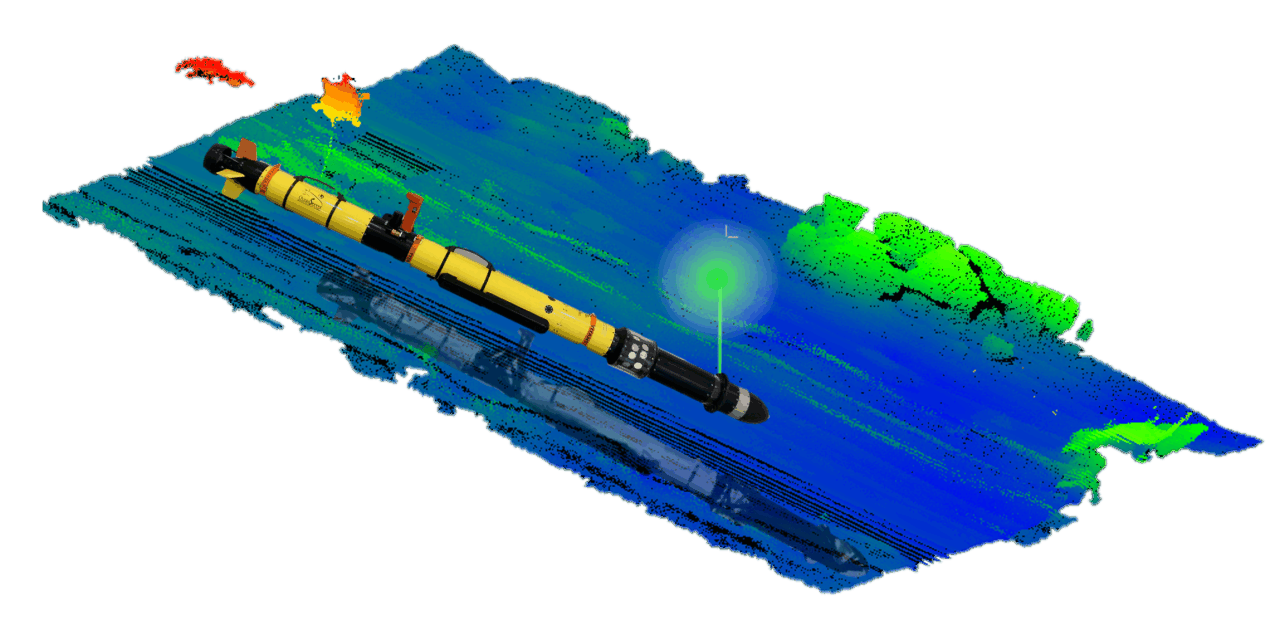
360° Pulsed Laser Line Scan LiDAR
Problem Statement:
Challenges when serving complex ocean environments such as harbors include:
- Objects of interest may be located on the seafloor, in the water column, at the surface, or above water.
- Most commercial LiDAR systems have narrow fields of view, limiting detection to a single plane (e.g., just the seafloor or surface).
- Observations from traditional systems are often difficult to align within a unified coordinate system.
Technology Solution Statement:
The compact 360° LiDAR system addresses these challenges by:
- Providing a cylindrical field of view for full-volume coverage across seafloor, water column, and surface.
- Enabling simultaneous detection of targets throughout the environment from small AUVs.
- Delivering consistently georeferenced data within a unified coordinate frame, improving spatial context and usability.
Benefits Statement:
- Enables full 360° sensing from a compact form factor on small AUVs
- Detects and maps objects on the seafloor, in the water column, and at the surface simultaneously
- Provides consistent georeferencing of all observations in a unified frame
- Increases situational awareness in complex, cluttered environments like harbors
- Reduces survey time by eliminating the need for multiple passes or sensor reorientation
- Successfully field-tested on a commercial Iver3 AUV platform under real-world conditions